실내 VR 자전거를 위한 노면 질감 구현
전석희 교수님
VHiKHU [바이쿠] - Bike와 발음 유사, VR × Haptics in KHU>)
김한엽 기계공학과
나혜원 컴퓨터공학과
윤동주 컴퓨터공학과
효과적인 VR 자전거 체험을 위한 노면 질감 데이터를 분석 및 구현
사용자에게 자전거가 달리는 노면의 질감을 사실적으로 전달함으로써 보다 현실과 유사한 VR 경험 제공
아두이노 사용 시 사용한 코드
- mega_switch: 아두이노 Mega용 가속도 + 속력 측정 코드(데이터 수집 시 사용)
- uno_switch: 아두이노 Uno용 가속도 + 속력 측정 코드(데이터 수집 시 사용)
- velo: 자전거 속력 측정 코드(진동 구현 시 사용)
수집한 가속도, 속력 데이터
- Arduino Sample: 아두이노를 사용하여 수집한 데이터
- Asphalt: DAQ를 이용하여 수집한 데이터(아스팔트 바닥)
- Field: DAQ를 이용하여 수집한 데이터(인조잔디 구장 바닥)
- Grid: DAQ를 이용하여 수집한 데이터(격자무늬 돌 바닥)
- Measure output: 구현한 시스템에서 출력된 데이터
- Segmented: 보간법을 위해 속력에 따라 구분된 데이터
매트랩 환경에서 DAQ 사용 시 사용한 코드
- IRtoVel.m: 수집한 IR센서 입력을 속력으로 변환
- acc1d.m: x, y, z 3축의 가속도를 1D 가속도로 변환
- arduino2.mlx: 아두이노와 연결하여 입력받는 속력에 따른 가속도 보간 및 출력
- asphaltcompare.mlx: 아스팔트 바닥으로 설정하였을 때 출력된 데이터와 수집한 데이터 비교
- dft321.m: x, y, z 3축의 가속도를 1D 가속도로 변환 (https://github.com/haptics-nri/mfi16-figures/blob/master/dft321.m)
- fieldcompare.mlx: 인조잔디 구장 바닥으로 설정하였을 때 출력된 데이터와 수집한 데이터 비교
- graph_3d_vel.m: 가속도와 속력 데이터를 그래프로 시각화
- gridcompare.mlx: 격자무늬 바닥으로 설정하였을 때 출력된 데이터와 수집한 데이터 비교
- highpass_1D.m: Highpass filter 적용 후 x, y, z 3축의 가속도를 1D 가속도로 변환
- segment5.m: 속력에 따른 데이터 분할
- selectbest.m: 분할된 데이터들의 분포 시각화
- speedmat.m: 분할된 가속도를 행렬로 변화
한국정보과학회논문, 최종보고서, 영상
교내 3곳의 장소를 선정하여 DAQ, 가속도계, 속도계가 부착된 자전거를 타며 속력 및 가속도 데이터를 수집했다.

데이터 수집 장소 표면 (왼쪽부터 아스팔트, 인조잔디, 돌 타일)

자전거에 센서를 부착하고 데이터를 수집하는 모습
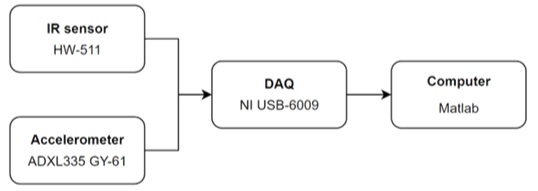
DAQ를 이용한 데이터 수집 시스템 개략도
수집한 데이터는 7Hz 이상의 High-pass filter로 중력의 영향과 노면의 미세한 돌출부와 홈으로 인한 노이즈를 제거하였다.
이후 진동구현을 위해 x, y, z축의 가속도 데이터의 기준을 모두 0으로 설정하였다.
각 축의 가속도 데이터를 푸리에 변환한 후 각 축의 진동수 크기를 벡터로 묶어 L2 Norm을 이용해 벡터의 크기를 구하고 벡터의 위상각을 구하였다.
이 두 값을 이용해 푸리에 역변환을 수행하여 1차원 데이터로 변환하였다.
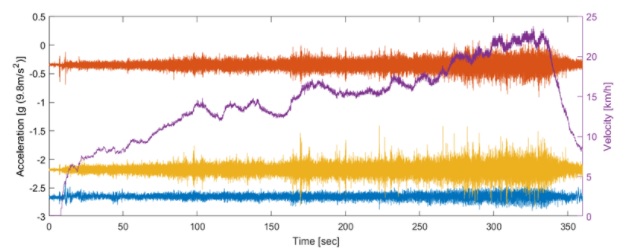
DAQ 시스템을 이용하여 수집한 속력과 가속도 데이터 (전처리 전)
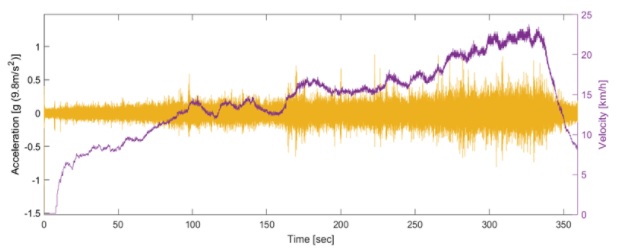
1차원 데이터화된 가속도와 속력 (전처리 후)
수집된 데이터는 노이즈 및 후반부의 급격한 감속구간을 제거한 뒤 오차범위를 ±0.2km/h로 설정하고 오차범위 내의 속력과 그에 따른 가속도 값을 분류하여 저장하였다.
아래 그림은 예시로 이해를 돕기 위해 범위를 크게 설정한 모습이다.
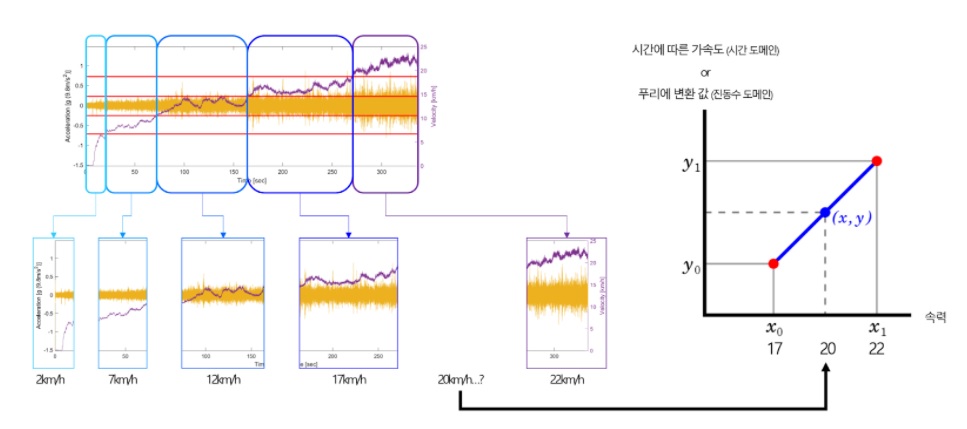
데이터 분할 및 보간 예시
사용자가 VR 자전거를 체험하며 점진적으로 변하는 속력에 따른 진동 데이터를 실시간으로 느낄 수 있도록 입력 데이터에 따라 실시간으로 가속도를 보간해서 출력한다.
아스팔트, 인조잔디, 타일 표면 각각의 데이터셋 중 최대 대표 속력이 20km/h를 넘기고 속력별 가속도가 많은 최적의 데이터셋을 선정하여 데이터 보간을 진행하였다.
나누어진 가속도 값들을 속도와 시간을 기준으로 하는 행렬로 저장한뒤 Matlab 내장함수인 interpol2를 사용해 시간 도메인 보간을 진행했다.
동일한 시간이 반복해서 출력되는 것을 방지하고자 매 출력시 임의의 랜덤 offset을 설정하여 같은 속력이라도 출력 데이터가 반복되지 않게 하였다.
핸들부에는 액츄에이터(Vibro Transducer Vp6)가 부착되어있고 앞주머니에는 아두이노와 앰플리파이어(XY-502)가 들어있다.
페달을 굴리면 뒷바퀴가 돌아가고 IR센서가 마킹을 읽고 신호를 보내 아두이노에서 속력으로 변환한다.
아두이노는 노트북의 Matlab으로 계산된 속력을 보내고 Matlab은 입력속력에 따라 보간을 수행한다.
보간으로 구해진 데이터를 앰플리파이어로 전송하고 액츄에이터를 통해 진동으로 출력되는 시스템이다.
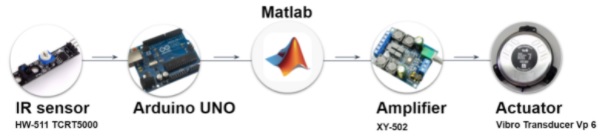
진동 구현 시스템 개략도

실제 자전거에 구현한 시스템
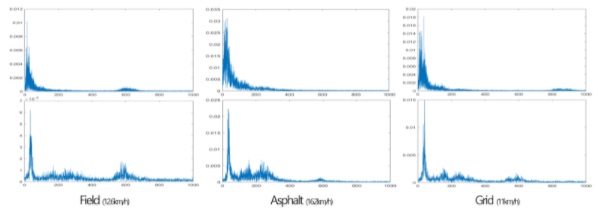
각 노면별 동일 속력에서의 가속도 비교 (상: 수집한 데이터, 하: 구현된 데이터)
저주파의 크기가 크고 고주파로 갈수록 작아지는 양상이 공통적으로 나타났다.
인조잔디구장(Field)의 경우 600Hz 부근의 출력이 유사하게 나타났다.
진동의 크기의 경우 앰플리파이어의 볼륨, 컴퓨터의 볼륨에 따라 변화하였기 때문에 직접 볼륨에 따른 크기를 체험해가며 설정했다.
조원 간의 자체 평가 결과 아스팔트, 인조잔디구장, 격자무늬바닥 순서로 현실의 표면과 유사한 것으로 나타났다.