diff --git a/README.md b/README.md
index 760b01cffd..7a93d7513b 100644
--- a/README.md
+++ b/README.md
@@ -1,12 +1,16 @@
# ORB-SLAM2
**Authors:** [Raul Mur-Artal](http://webdiis.unizar.es/~raulmur/), [Juan D. Tardos](http://webdiis.unizar.es/~jdtardos/), [J. M. M. Montiel](http://webdiis.unizar.es/~josemari/) and [Dorian Galvez-Lopez](http://doriangalvez.com/) ([DBoW2](https://github.com/dorian3d/DBoW2))
-**Current version:** 1.0.0
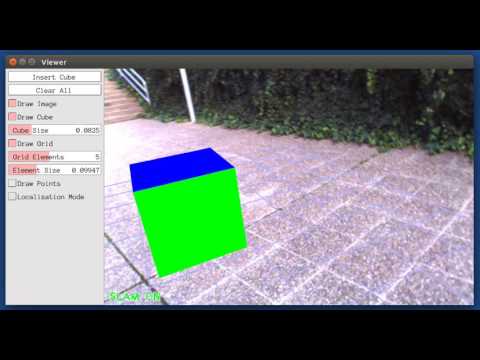
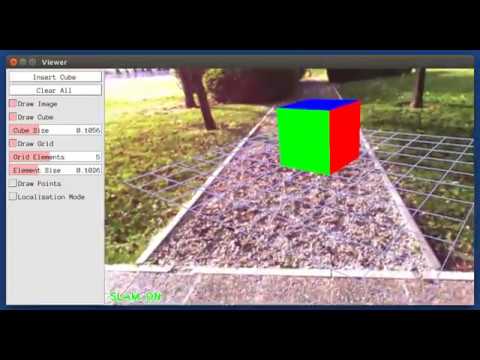
+**22 Dec 2016**: Added AR demo (see section 7).
ORB-SLAM2 is a real-time SLAM library for **Monocular**, **Stereo** and **RGB-D** cameras that computes the camera trajectory and a sparse 3D reconstruction (in the stereo and RGB-D case with true scale). It is able to detect loops and relocalize the camera in real time. We provide examples to run the SLAM system in the [KITTI dataset](http://www.cvlibs.net/datasets/kitti/eval_odometry.php) as stereo or monocular, in the [TUM dataset](http://vision.in.tum.de/data/datasets/rgbd-dataset) as RGB-D or monocular, and in the [EuRoC dataset](http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets) as stereo or monocular. We also provide a ROS node to process live monocular, stereo or RGB-D streams. **The library can be compiled without ROS**. ORB-SLAM2 provides a GUI to change between a *SLAM Mode* and *Localization Mode*, see section 9 of this document.
 +
+ +
+ ###Related Publications:
@@ -158,20 +162,18 @@ This will create **libORB_SLAM2.so** at *lib* folder and the executables **mono
#7. ROS Examples
-### Building the nodes for mono, stereo and RGB-D
+### Building the nodes for mono, monoAR, stereo and RGB-D
1. Add the path including *Examples/ROS/ORB_SLAM2* to the ROS_PACKAGE_PATH environment variable. Open .bashrc file and add at the end the following line. Replace PATH by the folder where you cloned ORB_SLAM2:
```
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
```
-2. Go to *Examples/ROS/ORB_SLAM2* folder and execute:
+2. Execute `build_ros.sh` script:
```
- mkdir build
- cd build
- cmake .. -DROS_BUILD_TYPE=Release
- make -j
+ chmod +x build_ros.sh
+ ./build_ros.sh
```
### Running Monocular Node
@@ -181,6 +183,14 @@ For a monocular input from topic `/camera/image_raw` run node ORB_SLAM2/Mono. Yo
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
```
+### Running Monocular Augmented Reality Demo
+This is a demo of augmented reality where you can use an interface to insert virtual cubes in planar regions of the scene.
+The node reads images from topic `/camera/image_raw`.
+
+ ```
+ rosrun ORB_SLAM2 MonoAR PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
+ ```
+
### Running Stereo Node
For a stereo input from topic `/camera/left/image_raw` and `/camera/right/image_raw` run node ORB_SLAM2/Stereo. You will need to provide the vocabulary file and a settings file. If you **provide rectification matrices** (see Examples/Stereo/EuRoC.yaml example), the node will recitify the images online, **otherwise images must be pre-rectified**.
###Related Publications:
@@ -158,20 +162,18 @@ This will create **libORB_SLAM2.so** at *lib* folder and the executables **mono
#7. ROS Examples
-### Building the nodes for mono, stereo and RGB-D
+### Building the nodes for mono, monoAR, stereo and RGB-D
1. Add the path including *Examples/ROS/ORB_SLAM2* to the ROS_PACKAGE_PATH environment variable. Open .bashrc file and add at the end the following line. Replace PATH by the folder where you cloned ORB_SLAM2:
```
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
```
-2. Go to *Examples/ROS/ORB_SLAM2* folder and execute:
+2. Execute `build_ros.sh` script:
```
- mkdir build
- cd build
- cmake .. -DROS_BUILD_TYPE=Release
- make -j
+ chmod +x build_ros.sh
+ ./build_ros.sh
```
### Running Monocular Node
@@ -181,6 +183,14 @@ For a monocular input from topic `/camera/image_raw` run node ORB_SLAM2/Mono. Yo
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
```
+### Running Monocular Augmented Reality Demo
+This is a demo of augmented reality where you can use an interface to insert virtual cubes in planar regions of the scene.
+The node reads images from topic `/camera/image_raw`.
+
+ ```
+ rosrun ORB_SLAM2 MonoAR PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
+ ```
+
### Running Stereo Node
For a stereo input from topic `/camera/left/image_raw` and `/camera/right/image_raw` run node ORB_SLAM2/Stereo. You will need to provide the vocabulary file and a settings file. If you **provide rectification matrices** (see Examples/Stereo/EuRoC.yaml example), the node will recitify the images online, **otherwise images must be pre-rectified**.