uni- or bivariate ctm #34
Replies: 3 comments 15 replies
-
|
Hi Carlotta,
Good luck! |
Beta Was this translation helpful? Give feedback.
-
|
I can't see any data points in that time range? do all subjects have multiple observations, what are the average time intervals between obs? you can use regular ggplot functionality to adjust the plots (the ctStanDiscretePars help file has an example, I think ctKalman does also), or you can create your own plot by using the data output when plot=FALSE. t0var is somewhat confusing unfortunately yes. whenever t0means are not indvarying, the relevant t0var rows / columns are used (e.g. if only the first t0mean is indvarying, indices above two are used). when t0means are indvarying, the relevant rows / columns are ignored and replaced internally with free parameters -- and additional free correlation parameters to any other random effects specified. So, to directly answer you: if indvarying is turned off for t0means, and variances are set to approximately zero, then there is no individual variation. If indvarying is turned off but t0var has non-zero variation, then there is individual variation that does not correlate with other individual differences. if indvarying is turned on, then there is individual variation that may correlate with other individual differences, and whatever is specified in t0var is ignored (for whichever t0means are indvarying). |
Beta Was this translation helpful? Give feedback.
-
|
Oh sorry, I forgot to turn removeObs = F again. Thank you for the explanation!
|
Beta Was this translation helpful? Give feedback.
-
|
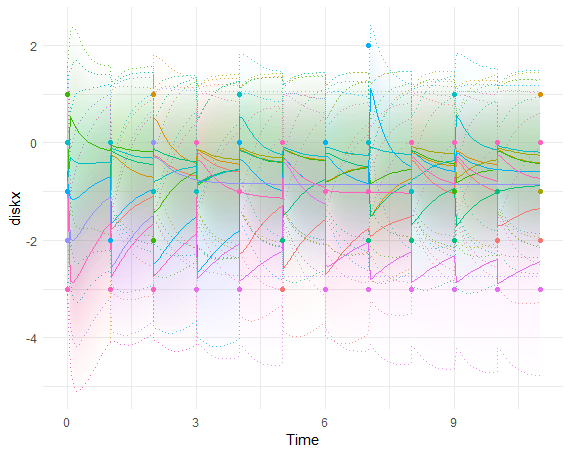
that's a lot of overlapping lines to process :) but it looks vaguely sensible now at least! can you describe what you think the model is doing? I'm a bit worried you've copied the nonlinear section a little too exactly -- the purpose of pointing you there is just to show how to make a parameter dependent on the system state, but it looks like you've copied the oscillating structure as well, so now your state dependent parameter is not just the autoregressive effect but is the frequency of an oscillator... |
Beta Was this translation helpful? Give feedback.
-
|
Oh my, you are totally right! I think it might be a technical problem, because setting the auto-effects equal works fine with “normal” driftparameters. I also ran a model with some timedependent predictors, which I also specified to have a base and state-dependent part. To set them equal for both partners of the couple is no problem. You can find my model specifications attached. |
Beta Was this translation helpful? Give feedback.
-
|
Well, a 2nd order model doesn't necessarily imply oscillations, though that's usually the context they've been used in psychology. Such a model is more flexible, but probably harder work to interpret and maybe unnecessary once you get into time variation! That is a weird error, seems that somewhere in the nonlinear code things get broken when you try reference a parameter called 'state' (this is used internally), so, just call it something different (not containing 'state') for now! It's fixed on the github ctsem version but you don't really need to update. |
Beta Was this translation helpful? Give feedback.
-
|
Hi Charles, I fit a model again with a base and state-dependent drift parameter and a time-dependent predictor that also consists of a base and a state-dependent parameter. The drift parameter is constrained to be negative, as you showed me. ctModel(type='stanct', id = "couple_id",
|

Beta Was this translation helpful? Give feedback.
-
|
That looks like an equilibrium to me, can you explain where you think the problems are? Maybe you're assuming zero should be the equilibrium point, when in fact it will be determined by the auto effect and continuous intercept? |
Beta Was this translation helpful? Give feedback.
-
|
Yes, overall, it looks like a stable node model. I calculate the rate of change based on the estimated effects to get a better picture of what is going on. Specifically, I fix certain variables in the model equation, such as the state of the latent process or the value of the predictor, and then compare the resulting rates of change with each other. In the present data, I noticed that under certain circumstances, a rate of change directed away from equilibrium results when you combine the values of the auto effect and the time-dependent predictors. While the closeness discrepancy (the latent process) tends to weaken/move towards zero, there are values of the time-dependent predictor that cause the closeness discrepancy to increase. |
Beta Was this translation helpful? Give feedback.
-
|
I don't totally follow you. A time dependent predictor will generally shift the system in a direction, and not necessarily towards equilibrium -- imagine e.g. taking a dose of medication or experiencing a traumatic event. Are your td predictors reasonably conceptualised as single events? If not, you might be better off modelling them as latent states with a measurement model. If you haven't seen it this paper has out-dated code but might be conceptually useful. |
Beta Was this translation helpful? Give feedback.
-
|
To more directly get at the question, I guess the answer is 'I think things are technically fine' and there is no specific bug in ctsem or anything here, but perhaps you have some confusion in your conceptualization that is worth thinking about. |
Beta Was this translation helpful? Give feedback.
-
|
Thank you, that already helps me! Perhaps my question was overly cautious; I'm still not entirely sure about the specific differences between ct models and conventional models. |
Beta Was this translation helpful? Give feedback.
-
|
This paper (soon out in psych methods) elaborates in some detail on the difference: |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
Hi Charles,
I want to compare two self-regulatory processes in terms of how quickly they return to their set point, but some problems arise:
Since they were originally measured with the same item ranging from -3 – 0 - +3, with negative deviations from zero representing one process and positive deviations from zero representing the second process, I split this item into two new variables (both ranging from 0 – 3, since I used the absolute deviations for simplicity). Now I am not sure if I can estimate both processes in a continuous time model or if two separete models are needed because of this dependent measurement.
If the latter is the case: Is it possible to compare the drift parameters between these separete contiunous time models? Do I need to convert them to discrete parameters to do this?
I tried running a simple continous time model for negative deviations as you can see here, the output from ctModelLatex is attached:
nf <- ctModel(type='stanct', id = "id",
time = "tag",
n.latent = 1,
n.manifest = 1,
manifestNames= 'n2dx',
latentNames= 'nd',
LAMBDA= 1,
DRIFT= 'a1',
MANIFESTMEANS= 0,
MANIFESTVAR= ‘me’,
CINT= ’cint’,
DIFFUSION= ‘diff’)
Since the variable has a meaningful zero-point I did not center it. However, I have to account for stable individual differences and as far as I know, you recommended to fix the manifest means and include a continuous intercept with indvarying = T. Is this sufficient? I know that including traits is possible in omx, but I did not understand how it is integrated in stan.
Also, I am assuming stationarity for the process. But if I include stationary = T in the ctStanFit operatior or try to manually set t0var and t0means as stationary, I get the following error message:
Stationary option temporarily unavailable -- reductions needed to pass all CRAN checks
How can I fix this?
Another error message I get is when I try to run ctKalman in any form:
Warning in min(x) : no non-missing arguments to min; returning Inf
Warning in max(x) : no non-missing arguments to max; returning -Inf
Error in seq.default(timerange[1], timerange[2], timestep) :
'from' must be a finite number
I assume that the error indicates that my model is not properly specified, but I have no idea what might be the problem. Could you explain why this error occures?
Thank you very much
Carlotta
ctsemTex1662538174.15687.pdf
Beta Was this translation helpful? Give feedback.
All reactions